//Электрика. – 2009. – № 10.– С. 3–7.
РАЗРАБОТКА АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ РЕАКТИВНОЙ МОЩНОСТЬЮ ПРОКАТНОГО СТАНА
Г. П. Корнилов, к. т. н., доцент, А. Н. Шеметов, к. т. н., доцент, ГОУ ВПО "МГТУ им. Г.И. Носова", Ю. П. Журавлев, гл энергетик, ОАО "ММК"
На крупных металлургических предприятиях существенное влияние на качество электроэнергии оказывают электроприёмники с нелинейными вольтамперными характеристиками – тиристорные преобразовательные агрегаты электроприводов прокатных станов. Они же являются основными потребителями реактивной мощности промышленного энергоузла.
Перечислим ряд особенностей системы электроснабжения стана 2000 горячей прокатки (рис. 1) с точки зрения компенсации реактивной мощности.
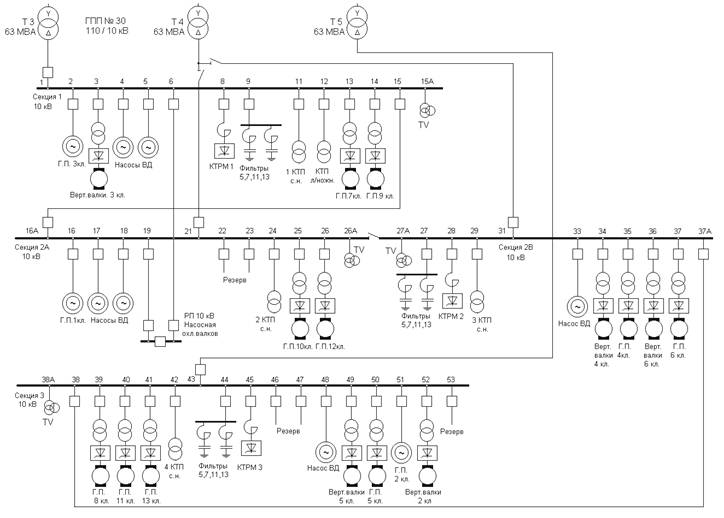
Рис.1. Схема электроснабжения 10 кВ стана 2000 ОАО "ММК"
1. К шинам каждой из трёх секций 10 кВ (секции 1, 2А-2Б, 3) вместе с тиристорными электроприводами постоянного тока чистовой группы подключён, как минимум, один синхронный электропривод черновых клетей.
2. Сортамент прокатываемых полос определяет нагрузки по клетям, диапазон их изменения прогнозируем.
3. Пиковая мощность работающих главных приводов (переменная составляющая) и мощность вспомогательных агрегатов (условно-постоянная составляющая) определяют нагрузки по секциям 10 кВ.
4. Схемы подключения тиристорных преобразователей (ТП) и синхронных двигателей клетей принципиально позволяют осуществлять компенсацию реактивной мощности путём ступенчатого включения конденсаторных батарей и плавного регулирования тока возбуждения синхронного двигателя.
В этих условиях становятся актуальными задачи определения тока возбуждения двигателя в зависимости от его режима работы, расчёта располагаемой реактивной мощности и суммарных потерь энергии на возбуждение. Решение всего комплекса задач в режиме реального времени возможно только с использованием автоматизированной системы управления реактивной мощностью, обеспечивающей:
• высокое быстродействие, соизмеримое с быстродействием ТП;
• широкий диапазон регулирования реактивной мощности;
• возможность плавного перехода из зоны выдачи в зону потребления;
• минимальное содержание высших гармоник тока, генерируемых в сеть;
• малые перенапряжения на оборудовании.
Принимая во внимание изложенные условия, компенсацию реактивной мощности целесообразно выполнить на основе конденсаторных батарей в составе фильтров высших гармоник, коммутируемых тиристорными ключами, и синхронных двигателей в режиме перевозбуждения.
Так как регулирование фильтро-компенсирующих устройств (ФКУ) осуществляется ступенчато, может возникнуть либо недокомпенсация, либо перекомпенсация реактивной мощности, что вызывает изменения (колебания) напряжения. Для устранения этого эффекта предлагается использовать компенсирующую способность синхронных двигателей (СД), значительная часть рабочего цикла которых приходится на холостой ход, поэтому генерация реактивной мощности возможна (до величины номинальной загрузки двигателя).
Суммарную реактивную мощность питающей секции образуют следующие составляющие:
![]() ,
(1)
,
(1)
где ![]() – реактивная мощность группы ТП;
– реактивная мощность группы ТП; ![]() – реактивная мощность,
генерируемая конденсаторными батареями;
– реактивная мощность,
генерируемая конденсаторными батареями; ![]() – реактивная мощность СД.
– реактивная мощность СД.
Реактивная мощность ТП на основной гармонике определяется по формуле:
![]() , (2)
, (2)
где ![]() – средние значения выпрямленного тока и напряжения ТП;
– средние значения выпрямленного тока и напряжения ТП; ![]() – выпрямленное
напряжение идеального холостого хода при нулевом угле управления;
– выпрямленное
напряжение идеального холостого хода при нулевом угле управления; ![]() – угол сдвига между
основными гармониками тока и напряжения на входе преобразователя.
– угол сдвига между
основными гармониками тока и напряжения на входе преобразователя.
Реактивная мощность, генерируемая конденсаторными батареями, равна
![]() ,
(3)
,
(3)
где ![]() – переменное напряжение, прикладываемое к
конденсаторной батарее;
– переменное напряжение, прикладываемое к
конденсаторной батарее; ![]() – угловая частота напряжения;
– угловая частота напряжения; ![]() – ёмкость
конденсаторной батареи.
– ёмкость
конденсаторной батареи.
Реактивная мощность СД в режиме холостого хода зависит от напряжения и тока возбуждения, в первом приближении её можно оценить по упрощённой формуле:
 ,
(4)
,
(4)
где ![]() ,
, ![]() – номинальные значения напряжения и тока
СД;
– номинальные значения напряжения и тока
СД; ![]() – относительное
значение напряжения на зажимах двигателя;
– относительное
значение напряжения на зажимах двигателя; ![]() – ток возбуждения СД;
– ток возбуждения СД; ![]() – реактивное сопротивление
ротора по продольной оси, о. е.;
– реактивное сопротивление
ротора по продольной оси, о. е.; ![]() – ток возбуждения холостого хода при
номинальном напряжении на обмотках статора.
– ток возбуждения холостого хода при
номинальном напряжении на обмотках статора.
С учётом данных особенностей предложен способ регулирования реактивной мощности в узле нагрузки, согласно которому осуществляется ступенчатое изменение мощности батарей статических компенсаторов и последующая плавная подстройка за счёт автоматического регулирования тока возбуждения синхронного двигателя. Разработана система автоматического управления устройствами компенсации реактивной мощности и улучшения гармонического состава напряжения, реализующая предложенный способ.
Структурная схема, представленная на рис. 2, включает силовые элементы (систему регулирования возбуждения СД и системы управления тиристорных ключей), а также устройства сбора/обработки данных и информационно-управляющие каналы связи. Входные сигналы системы поступают с датчиков напряжения (ДН) и реактивной мощности (ДРМ) на сборных шинах РУ-10 кВ, а также от датчиков тока ТП чистовых клетей и датчиков тока возбуждения СД черновых клетей. Эти элементы составляют первый (низший) уровень системы управления.
Рис. 2. Структурная схема системы регулирования реактивной мощности:
Т – сетевой трансформатор 110/10 кВ; ТП – тиристорный преобразователь; М – двигатель постоянного тока; ТК – тиристорный ключ; C – конденсаторная батарея; L – реактор; СД – синхронный двигатель; ТВ – тиристорный возбудитель; ДН – датчик напряжения; ДРТ – датчик реактивного тока; ДТ – датчик тока приводов клетей; ДТВ – датчик тока возбуждения; ПК – промышленный контроллер; САРВ – система автоматического регулирования; СУКБ – система управления секциями конденсаторных батарей; БУТф – блоки управления тиристорами фильтра
В качестве логико-управляющего звена используется промышленный котроллер (ПК) с соответствующим программным обеспечением, который обрабатывает полученные данные в режиме реального времени, составляет баланс реактивной мощности и выдаёт команду в систему АРВ синхронного двигателя и систему управления конденсаторными батареями СУКБ, где происходит формирование мощности конденсаторов за счёт выбора необходимого числа ступеней и времени их включения.
Элементами второго (высшего) уровня разрабатываемой системы являются существующие серверы и рабочие станции автоматизированных систем управления энергоресурсами (АСУЭ) и технологическим процессом (АСУТП) ЛПЦ-10. Современные промышленные контроллеры обеспечивают обмен данными по локальной сети Ethernet, что позволяет формировать команды на управление и получать информацию о режимах работы стана в реальном времени.
Например, задавая заранее известный профиль прокатки, активную мощность по клетям, а также приоритеты управления (постоянство напряжения, минимум потребления реактивной мощности и др.), в предложенной системе возможно реализовать опережающее адаптивное управление, а также повысить информированность электротехнического и технологического персонала цеха, что расширяет возможности существующих АСУЭ и АСУТП.
Задача оперативного управления устройствами компенсации реактивной мощности сводится к поддержанию заданного оптимального значения реактивной мощности на сборных шинах 10 кВ в каждый момент прокатки, т. е. при непрерывно меняющейся активной и реактивной нагрузке. При наличии двух и более источников реактивной мощности с различным принципом действия одновременное управление ими затруднено в силу различного быстродействия, поэтому возможно появление статической и динамической ошибок. Это вызывает не только дополнительные колебания реактивной мощности и напряжения, но и преждевременный отказ оборудования, поэтому необходимо разработать алгоритм управления, учитывающий быстродействие и последовательность переключений.
В теории автоматического управления часто используется принцип регулирования, согласно которому одна из установок работает в так называемом базовом режиме – в нашем случае с реактивной мощностью, равной средней величине:
![]() , (5)
, (5)
а вторая – в режиме дополнительного регулятора с постоянно изменяемой реактивной мощностью для плавной подстройки главного регулятора:
 . (6)
. (6)
Суммарная мощность определяется общим заданием на компенсацию реактивной мощности, причём главный регулятор формирует задание только на генерацию недостающей мощности в режиме её дефицита.
В предлагаемой
системе в качестве дополнительного регулятора выбраны существующие в цехе
синхронные машины с рабочей точкой примерно в центре U-образной характеристики – при ![]() Тогда батареи статических
компенсаторов могут работать в базовом режиме, осуществляя ступенчатое регулирование
за счёт соответствующего сочетания трёх ступеней конденсаторных батарей. Общий
принцип такого способа регулирования поясняется с помощью временных диаграмм (рис.
3). Батареи конденсаторов компенсируют условно постоянную составляющую
реактивной мощности, соответствующую прокатываемому сортаменту, а её колебания
при изменении нагрузок отдельных клетей устраняются за счёт управления током
возбуждения СД в реальном времени.
Тогда батареи статических
компенсаторов могут работать в базовом режиме, осуществляя ступенчатое регулирование
за счёт соответствующего сочетания трёх ступеней конденсаторных батарей. Общий
принцип такого способа регулирования поясняется с помощью временных диаграмм (рис.
3). Батареи конденсаторов компенсируют условно постоянную составляющую
реактивной мощности, соответствующую прокатываемому сортаменту, а её колебания
при изменении нагрузок отдельных клетей устраняются за счёт управления током
возбуждения СД в реальном времени.
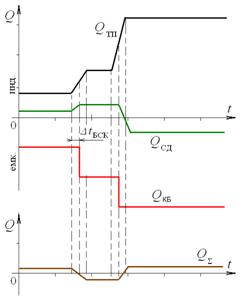

а б в
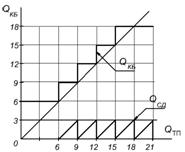
Рис. 3. Диаграммы управления мощностью компенсирующих устройств (а) и зависимости изменения реактивной мощности КБ и СД при различных принципах управления (б, в)
Количество ступеней и мощности каждой из них выбирают с учётом того, чтобы в установившемся режиме работы ТП одной или двух клетей суммарная мощность конденсаторных батарей приближалась к мощности ТП с небалансом, не превышающим компенсирующую способность СД.
При изменении реактивной
мощности нагрузки QТП в диапазоне 6–12 Мвар возможны два
алгоритма управления реактивной мощностью КБ. В первом (рис. 3, б)
мощность КБ принимается ближайшей меньшей из указанного ряда, а разница компенсируется
за счёт СД, работающего в режиме перевозбуждения: ![]() →min. Например, при
→min. Например, при ![]() =10 Мвар в сеть включается конденсаторная
батарея
=10 Мвар в сеть включается конденсаторная
батарея ![]() =9 Мвар,
а недостающий 1 Мвар компенсирует СД. Во втором случае (рис. 3, в) принимают
ближайшее большее значение
=9 Мвар,
а недостающий 1 Мвар компенсирует СД. Во втором случае (рис. 3, в) принимают
ближайшее большее значение ![]() , а разность устраняется за счёт СД,
работающего в режиме потребления реактивной мощности:
, а разность устраняется за счёт СД,
работающего в режиме потребления реактивной мощности: ![]() →min.
→min.
Это значит, при ![]() =10 Мвар включаются две секции КБ
суммарной мощностью 3+9=12 Мвар, а разность 2 Мвар покроет СД в режиме
недовозбуждения. Однако такой режим не обеспечивает достаточной устойчивости в
случае приложения нагрузки, а в условиях действующего производства требование
обеспечения устойчивости СД является приоритетным, поэтому принимается первый
алгоритм управления КБ. Он является и менее затратным в отношении установки
дополнительного оборудования, так как в первом варианте установленная мощность
конденсаторов 18 Мвар, а во втором – 21 Мвар.
=10 Мвар включаются две секции КБ
суммарной мощностью 3+9=12 Мвар, а разность 2 Мвар покроет СД в режиме
недовозбуждения. Однако такой режим не обеспечивает достаточной устойчивости в
случае приложения нагрузки, а в условиях действующего производства требование
обеспечения устойчивости СД является приоритетным, поэтому принимается первый
алгоритм управления КБ. Он является и менее затратным в отношении установки
дополнительного оборудования, так как в первом варианте установленная мощность
конденсаторов 18 Мвар, а во втором – 21 Мвар.
Выводы
1. Для тиристорных преобразователей прокатных станов с ударным приложением нагрузки рекомендовано применять компенсацию динамических изменений реактивной мощности с помощью конденсаторных батарей, регулируемых ступенчато, в функции тока двигателя электропривода чистовой клети.
2. Вследствие ступенчатого включения конденсаторных батарей происходят недокомпенсация или перекомпенсация реактивной мощности, что может быть устранено с помощью АРВ СД с отрицательной обратной связью по реактивному току питающей секции.
3. Рассмотрены возможные алгоритмы переключения ступеней КБ и выбрана оптимальная стратегия работы, основанная на перекомпенсации мощности с помощью батарей в составе фильтров высших гармоник и дополнительном потреблении величины небаланса синхронными двигателями.
4. Реализация совместного регулирования компенсирующих устройств в режиме реального времени представлена в виде автоматизированной системы управления реактивной мощностью, связанной с АСУТП и АСУЭ производственного объекта.
Список литературы
1. ГОСТ 13109–97 Нормы качества электроэнергии в системах электроснабжения общего назначения. М.: Издательство стандартов, 1998.
2. Корнилов Г. П., Шеметов А. Н., Осипов А. В. Современные проблемы электромагнитной совместимости в системах электроснабжения с резкопеременными и нелинейными нагрузками // Изв. вузов. Электромеханика. 2006. № 4. С. 89–93.
3. Федеральный закон РФ "О техническом регулировании" от 27.12.2002 г. № 184-ФЗ (с изменениями от 09.05.2005 г.).
4. Федеральный закон РФ "Об электроэнергетике" от 26.03.2003 г. № 35-ФЗ (с изменениями и дополнениями от 18.12.2006 г.).
5. Першин Ю. С., Першина Л. М. Расчёт оптимального режима работы синхронного двигателя // Электричество. 1981. № 9. С. 30–33.
6. Корнилов Г. П., Шурыгина Г. В. Динамика изменения реактивной мощности вентильных преобразователей постоянного тока // Промышленная энергетика. 1986. № 7.